接口
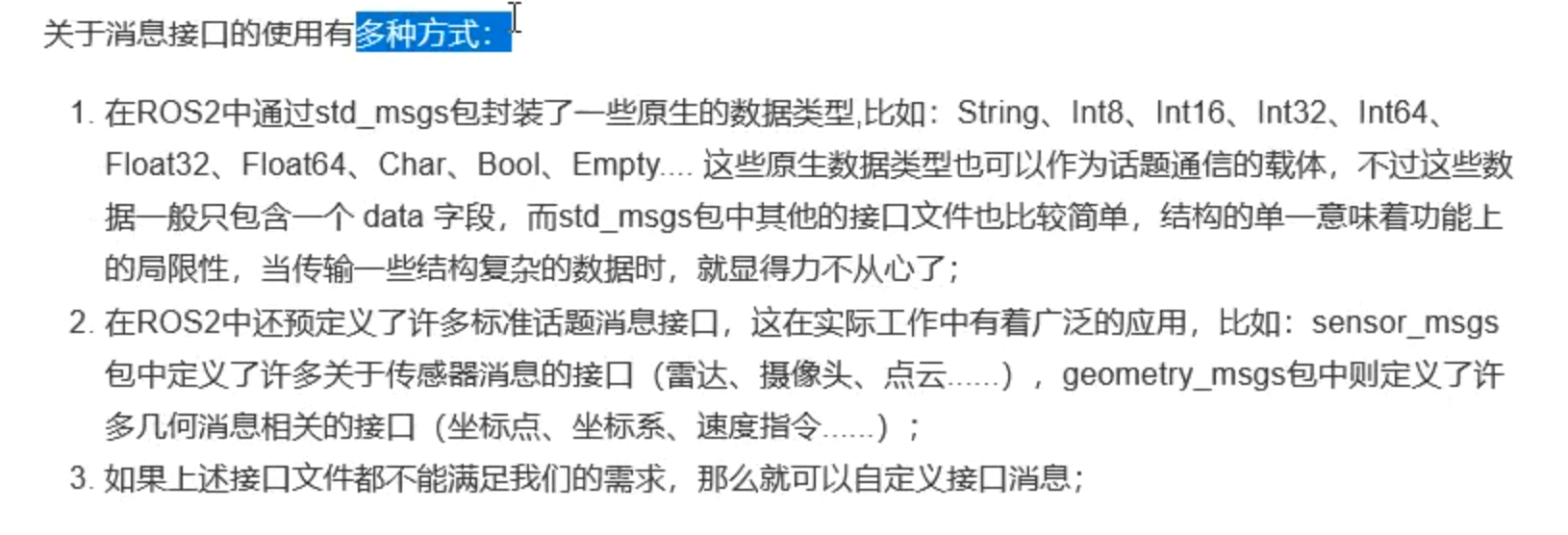
接口:通信时使用的数据载体(特定的格式),由接口文件定义
msg文件:用于话题通信,
srv文件:用于服务通信
action文件:用于动作通信
参数通信不使用,操作参数对象
话题通信:
基于发布订阅模式
发布者:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 #include <rclcpp/rclcpp.hpp> #include "std_msgs/msg/string.hpp" using namespace std::chrono_literals;class Talker :public rclcpp::Node{public : Talker () :Node ("talker" ),count (0 )){ RCLCPP_INFO (this ->get_logger (),"a talker created" ); publisher_ = this ->create_publisher <std_msgs::msg::String>("chat" ,10 ); timer_ = this ->create_wall_timer (1 s,std::bind (&Talker::on_timer,this )); } private : rclcpp::TimerBase::SharedPtr timer_ ; rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_; size_t count; void on_timer () auto message = std_msgs::msg::String (); message.data = "hello world!" + std::to_string (count++); RCLCPP_INFO (this ->get_logger (),"发布者发布消息:%s" ,message.data.c_str ()); publisher_->publish (message); } }; int main (int argc, char ** argv) rclcpp::init (argc,argv); rclcpp::spin (std::make_shared <Talker>()); rclcpp::shutdown (); return 0 ; }
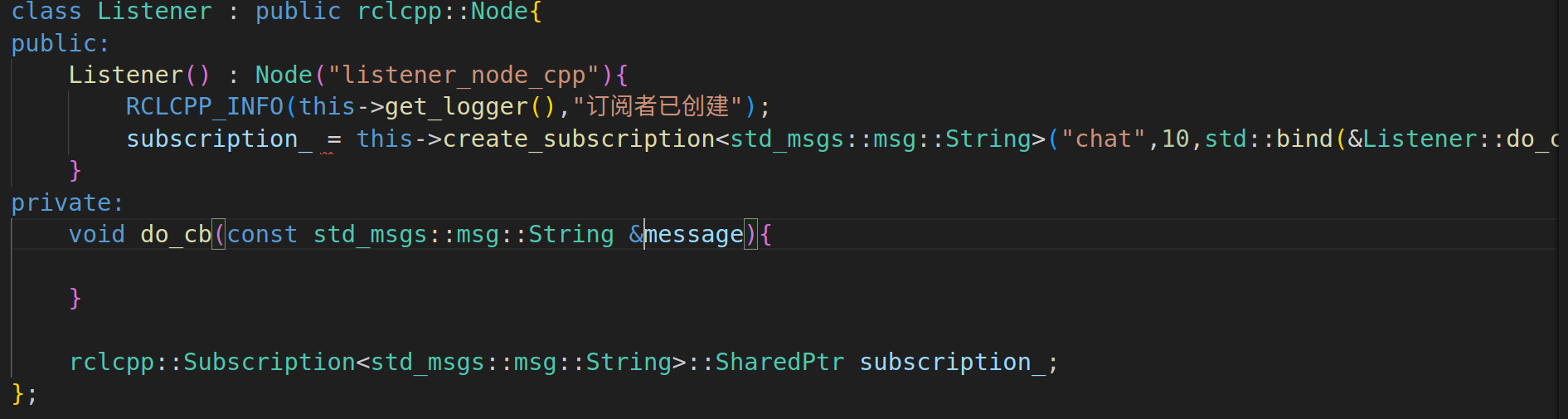
订阅方
回调函数传入参数类型不能是std_msgs::msg::String的引用
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 #include <rclcpp/rclcpp.hpp> #include <std_msgs/msg/string.hpp> class Listener : public rclcpp::Node{public : Listener () : Node ("listener_node_cpp" ){ RCLCPP_INFO (this ->get_logger (),"订阅者已创建" ); subscription_ = this ->create_subscription <std_msgs::msg::String>("chat" ,10 ,std::bind (&Listener::do_cb,this ,std::placeholders::_1)); } private : void do_cb (const std_msgs::msg::String::SharedPtr message) RCLCPP_INFO (this ->get_logger (),"订阅到的消息是:%s" ,message->data.c_str ()); } rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_; }; int main (int argc, char ** argv) rclcpp::init (argc,argv); rclcpp::spin (std::make_shared <Listener>()); rclcpp::shutdown (); return 0 ; }
生成代码片段
自定义接口文件——编译前保存!!!!
文件名首字母大写
xml文件配置
1 2 3 4 5 6 7 8 <build_depend > </build_depend > <exec_depend > </exec_depend > <member_of_group > </member_of_group >
ros2 pkg list | grep -i NAME 筛选出来,不用记
CMakeLists.txt
1 2 3 4 5 6 find_package (rosidl_default_generators REQUIRED)rosidl_generate_interfaces( ${PROJECT_NAME} "msg/Student.msg" )
使用自定义接口文件要包含路径
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 #include <rclcpp/rclcpp.hpp> #include <base_interfaces_demo/msg/student.hpp> using namespace std::chrono_literals;using base_interfaces_demo::msg::Student;class TalkerStu :public rclcpp::Node{public : TalkerStu () :Node ("talker_stu" ){ publisher_ = this ->create_publisher <Student>("Student" ,10 ); timer_ = this ->create_wall_timer (1 s,std::bind (&TalkerStu::callback,this )); } private : rclcpp::Publisher<Student>::SharedPtr publisher_; rclcpp::TimerBase::SharedPtr timer_; Student stu; void callback () stu.name = "lihua" ; stu.age = 12 ; stu.height = 180.0 ; publisher_->publish (stu); RCLCPP_INFO (this ->get_logger (),"发布消息:%s,%d,%lf" ,stu.name.c_str (),stu.age,stu.height); } }; int main (int argc,char **argv) rclcpp::init (argc,argv); rclcpp::spin (std::make_shared <TalkerStu>()); rclcpp::shutdown (); return 0 ; }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 #include <rclcpp/rclcpp.hpp> #include <base_interfaces_demo/msg/student.hpp> using base_interfaces_demo::msg::Student;using namespace std::chrono_literals;class ListenerStu :public rclcpp::Node{public : ListenerStu () :Node ("listener_stu" ){ RCLCPP_INFO (this ->get_logger (),"订阅者已创建" ); subscription_ = this ->create_subscription <Student>("Student" ,10 ,std::bind (&ListenerStu::callback,this ,std::placeholders::_1)); } private : rclcpp::Subscription<Student>::SharedPtr subscription_; void callback (const Student::SharedPtr message) RCLCPP_INFO (this ->get_logger (),"订阅者已接收:%s,%d,%lf" ,message->name.c_str (),message->age,message->height); } }; int main (int argc,char **argv) rclcpp::init (argc,argv); rclcpp::shutdown (); return 0 ; }
服务通信
一对多,一个服务端,多个客户端
自定义接口文件
在之前的基础上,修改CMakeLists.txt ——rosidl_generate_interfaces即可
服务端
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 #include <rclcpp/rclcpp.hpp> #include <base_interfaces_demo/srv/addints.hpp> using base_interfaces_demo::srv::Addints;using std::placeholders::_1;using std::placeholders::_2;class AddIntServer :public rclcpp::Node{public : AddIntServer () :Node ("add_int_server" ){ RCLCPP_INFO (this ->get_logger (),"服务端节点创建成功" ); service_ = this ->create_service <Addints>("add_ints" ,std::bind (&AddIntServer::sum,this ,_1,_2)); } private : rclcpp::Service<Addints>::SharedPtr service_; void sum (const Addints::Request::SharedPtr req,const Addints::Response::SharedPtr res) res->sum = req->num1 + req->num2; RCLCPP_INFO (this ->get_logger (),"%d + %d = %d" ,req->num1,req->num2,res->sum); } }; int main (int argc,char **argv) rclcpp::init (argc,argv); rclcpp::spin (std::make_shared <AddIntServer>()); rclcpp::shutdown (); return 0 ; }
测试:ros2 service call /add_ints base_interfaces_demo/srv/Addints “{'num1':10,'num2':30}"
rclcpp::ok();
客户端
main函数中需要判断提交参数是否正确
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 #include <rclcpp/rclcpp.hpp> #include <base_interfaces_demo/srv/addints.hpp> using base_interfaces_demo::srv::Addints;using namespace std::chrono_literals;class AddIntClient :public rclcpp::Node {public : AddIntClient () :Node ("add_int_client" ){ RCLCPP_INFO (this ->get_logger (),"客户端节点创建" ); client_ = this ->create_client <Addints>("add_ints" ); } bool connect_server () while (!client_ -> wait_for_service (1 s)){ if (!rclcpp::ok ()){ RCLCPP_INFO (rclcpp::get_logger ("rclcpp" ),"强制退出" ); return false ; } RCLCPP_INFO (rclcpp::get_logger ("rclcpp" ),"服务器连接中" ); } return true ; } rclcpp::Client<Addints>::SharedFuture send_request (int num1,int num2) { auto request = std::make_shared <Addints::Request>(); request->num1 = num1; request->num2 = num2; return client_->async_send_request (request); } private : rclcpp::Client<Addints>::SharedPtr client_; }; int main (int argc,char **argv) if (argc != 3 ){ RCLCPP_ERROR (rclcpp::get_logger ("rclcpp" ),"请提交两个整型数据" ); return 1 ; } rclcpp::init (argc,argv); auto client = std::make_shared <AddIntClient>(); bool flag = client->connect_server (); if (!flag){ RCLCPP_INFO (rclcpp::get_logger ("rclcpp" ),"服务器连接失败" ); return 0 ; } auto future = client->send_request (atoi (argv[1 ]),atoi (argv[2 ])); if (rclcpp::spin_until_future_complete (client,future) == rclcpp::FutureReturnCode::SUCCESS){ RCLCPP_INFO (client->get_logger (),"响应成功!sum = %d" ,future.get ()->sum); }else { RCLCPP_INFO (client->get_logger (),"sd" ); } rclcpp::shutdown (); return 0 ; }
动作通信
自定义接口文件
1 2 3 4 5 请求数据 --- 响应数据 --- 反馈数据
xml:
1 2 3 <buildtool_depend > rosidl_default_generators</buildtool_depend > <depend > action_msgs</depend >
CMakeLists.txt补充rosidl_generate_interfaces
服务端
ros2 action send_goal /get_sum base_interfaces_demo/action/Progress -f "{'num':10}"
rclcpp::Rate 的构造函数接受一个频率值(单位为 Hz),表示每秒执行的次数。例如:
rate.sleep() 方法来暂停代码的执行,直到下一次循环的时间点。如果当前循环提前完成,rate.sleep() 会阻塞当前线程,直到达到预期的频率。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 #include <rclcpp/rclcpp.hpp> #include <rclcpp_action/rclcpp_action.hpp> #include <base_interfaces_demo/action/progress.hpp> using base_interfaces_demo::action::Progress;using std::placeholders::_1;using std::placeholders::_2;class ActionService :public rclcpp::Node{public : ActionService () :Node ("action_service" ){ RCLCPP_INFO (this ->get_logger (),"服务器已创建!" ); server_ = rclcpp_action::create_server <Progress>( this , "get_sum" , std::bind (&ActionService::handle_goal,this ,_1,_2), std::bind (&ActionService::handle_cancel,this ,_1), std::bind (&ActionService::handle_accepted,this ,_1) ); } private : rclcpp_action::Server<Progress>::SharedPtr server_; rclcpp_action::GoalResponse handle_goal (const rclcpp_action::GoalUUID& uuid,std::shared_ptr<const Progress::Goal> goal) { if (goal->num <= 1 ){ RCLCPP_INFO (this ->get_logger (),"提交数据小于1" ); return rclcpp_action::GoalResponse::REJECT; } RCLCPP_INFO (this ->get_logger (),"提交数据合法" ); return rclcpp_action::GoalResponse::ACCEPT_AND_EXECUTE; } rclcpp_action::CancelResponse handle_cancel (std::shared_ptr<rclcpp_action::ServerGoalHandle<Progress>> goal_handle) { RCLCPP_INFO (this ->get_logger (),"任务已取消" ); return rclcpp_action::CancelResponse::ACCEPT; } void execute (std::shared_ptr<rclcpp_action::ServerGoalHandle<Progress>> goal_handle) int num = goal_handle->get_goal ()->num; int sum=0 ; double progress; auto feedback = std::make_shared <Progress::Feedback>(); auto result = std::make_shared <Progress::Result>(); rclcpp::Rate rate (1.0 ) ; for (int i = 1 ;i<=num;i++){ sum+=i; progress = i / (double )num; feedback->progress = progress; goal_handle->publish_feedback (feedback); RCLCPP_INFO (this ->get_logger (),"连续反馈中,进度:%.2f" ,progress); if (goal_handle->is_canceling ()){ result->sum = sum; goal_handle->canceled (result); RCLCPP_INFO (this ->get_logger (),"反馈取消,结果:%d" ,sum); return ; } rate.sleep (); } if (rclcpp::ok ()){ result->sum = sum; goal_handle->succeed (result); RCLCPP_INFO (this ->get_logger (),"最终响应结果:%d" ,sum); } } void handle_accepted (std::shared_ptr<rclcpp_action::ServerGoalHandle<Progress>> goal_handle) std::thread (std::bind (&ActionService::execute,this ,goal_handle)).detach (); } }; int main (int argc,char **argv) rclcpp::init (argc,argv); rclcpp::spin (std::make_shared <ActionService>()); rclcpp::shutdown (); return 0 ; }
客户端
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 #include <rclcpp/rclcpp.hpp> #include <rclcpp_action/rclcpp_action.hpp> #include <base_interfaces_demo/action/progress.hpp> using base_interfaces_demo::action::Progress;using namespace std::chrono_literals;using std::placeholders::_1;using std::placeholders::_2;class ActionClient :public rclcpp::Node{public : ActionClient () :Node ("action_client" ){ RCLCPP_INFO (this ->get_logger (),"Action 客户端已创建" ); client_ = rclcpp_action::create_client <Progress>(this ,"get_sum" ); } void send (int num) if (!client_->wait_for_action_server (10 s)){ RCLCPP_ERROR (this ->get_logger (),"服务器连接失败!" ); return ; } auto goal = Progress::Goal (); auto options = rclcpp_action::Client<Progress>::SendGoalOptions (); goal.num = num; options.feedback_callback = std::bind (&ActionClient::feedback_callback,this ,_1,_2); options.goal_response_callback = std::bind (&ActionClient::goal_response_callback,this ,_1); options.result_callback = std::bind (&ActionClient::result_callback,this ,_1); auto future = client_->async_send_goal (goal,options); } void feedback_callback (rclcpp_action::ClientGoalHandle<Progress>::SharedPtr goal_handle,const std::shared_ptr<const Progress::Feedback> feedback) double progress = feedback->progress; RCLCPP_INFO (this ->get_logger (),"进度:%lf" ,progress); } void goal_response_callback (std::shared_future<rclcpp_action::ClientGoalHandle<Progress>::SharedPtr> goal_handle) if (!goal_handle.get ()){ RCLCPP_INFO (this ->get_logger (),"请求被拒绝" ); }else { RCLCPP_INFO (this ->get_logger (),"请求成功" ); } } void result_callback (const rclcpp_action::ClientGoalHandle<Progress>::WrappedResult &result) if (result.code == rclcpp_action::ResultCode::SUCCEEDED){ RCLCPP_INFO (this ->get_logger (),"成功!,结果:%d" ,result.result->sum); }else { RCLCPP_ERROR (this ->get_logger (),"失败!" ); } } private : rclcpp_action::Client<Progress>::SharedPtr client_; }; int main (int argc,char **argv) if (argc !=2 ){ RCLCPP_ERROR (rclcpp::get_logger ("rclcpp" ),"请提交一个整型数据!" ); return 1 ; } rclcpp::init (argc,argv); auto node = std::make_shared <ActionClient>(); node->send (atoi (argv[1 ])); rclcpp::spin (node); rclcpp::shutdown (); return 0 ; }
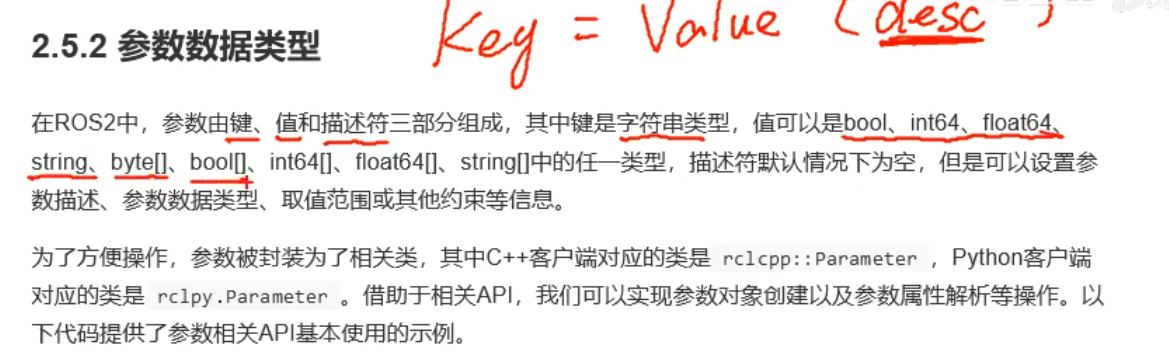
参数通信
ros2 param listros2 param get my_server wheels
服务端
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 #include <rclcpp/rclcpp.hpp> class MyServer :public rclcpp::Node{public : MyServer () :Node ("my_server" ,rclcpp::NodeOptions ().allow_undeclared_parameters (true )){ RCLCPP_INFO (this ->get_logger (),"参数服务器已建立" ); } void declare () RCLCPP_INFO (this ->get_logger (),"------------增-----------" ); this ->declare_parameter ("car_type" ,"tiger" ); this ->declare_parameter ("width" ,1.5 ); this ->declare_parameter ("wheels" ,5 ); this ->set_parameter (rclcpp::Parameter ("height" ,1.8 )); } void get () RCLCPP_INFO (this ->get_logger (),"------------查-----------" ); auto car = this ->get_parameter ("car_type" ); RCLCPP_INFO (this ->get_logger (),"key = %s , value = %s" ,car.get_name ().c_str (),car.as_string ().c_str ()); auto params = this ->get_parameters ({"car_type" ,"width" ,"wheels" }); for (rclcpp::Parameter n : params){ RCLCPP_INFO (this ->get_logger (),"key = %s , value = %s" ,n.get_name ().c_str (),n.value_to_string ().c_str ()); RCLCPP_INFO (this ->get_logger (),"是否包含%s? %d" ,n.get_name ().c_str (),this ->has_parameter (n.get_name ())); } } void update () RCLCPP_INFO (this ->get_logger (),"------------改-----------" ); this ->set_parameter (rclcpp::Parameter ("width" ,1.4 )); RCLCPP_INFO (this ->get_logger (),"width = %lf" ,this ->get_parameter ("width" ).as_double ()); } void del () RCLCPP_INFO (this ->get_logger (),"------------删-----------" ); this ->undeclare_parameter ("car_type" ); RCLCPP_INFO (this ->get_logger (),"car_type还存在吗? %d" ,this ->has_parameter ("car_type" )); } private :}; int main (int argc,char **argv) rclcpp::init (argc,argv); auto node = std::make_shared <MyServer>(); node->declare (); node->get (); node->update (); node->del (); rclcpp::spin (node); rclcpp::shutdown (); return 0 ; }
客户端
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 #include <rclcpp/rclcpp.hpp> #include <vector> using namespace std::chrono_literals;class MyClient :public rclcpp::Node{public : MyClient () :Node ("my_client" ){ RCLCPP_INFO (this ->get_logger (),"参数客户端已建立" ); client_ = std::make_shared <rclcpp::SyncParametersClient>(this ,"my_server" ); } bool connect_server () while (!client_->wait_for_service (1 s)){ if (!rclcpp::ok ()){ RCLCPP_INFO (this ->get_logger (),"中断!" ); return false ; } RCLCPP_INFO (this ->get_logger (),"连接中" ); } return true ; } void get () RCLCPP_INFO (this ->get_logger (),"获取" ); std::string car_name =client_->get_parameter <std::string>("car_type" ); double width = client_->get_parameter <double >("width" ); RCLCPP_INFO (this ->get_logger (),"car_name:%s" ,car_name.c_str ()); RCLCPP_INFO (this ->get_logger (),"width:%lf" ,width); auto params = client_->get_parameters ({"car_type" ,"width" }); for (rclcpp::Parameter n : params){ RCLCPP_INFO (this ->get_logger (),"key = %s , value = %s" ,n.get_name ().c_str (),n.value_to_string ().c_str ()); } RCLCPP_INFO (this ->get_logger (),"car_type? %d" ,client_->has_parameter ("car_type" )); } void update () RCLCPP_INFO (this ->get_logger (),"修改" ); client_->set_parameters ({rclcpp::Parameter ("car_type" ,"pig" ), rclcpp::Parameter ("length" ,"5.0" )}); RCLCPP_INFO (this ->get_logger (),"length? %d" ,client_->has_parameter ("length" )); } private : rclcpp::SyncParametersClient::SharedPtr client_; }; int main (int argc,char **argv) rclcpp::init (argc,argv); auto note = std::make_shared <MyClient>(); bool flag = note->connect_server (); if (!flag == true ){ return 0 ; } note->get (); note->update (); note->get (); rclcpp::spin (note); rclcpp::shutdown (); return 0 ; }
出现乱码:C语言字符串输出不兼容