pid通俗解释
单级PID
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
|
typedef struct
{
float kp, ki, kd;
float error, lastError;
float integral, maxIntegral;
float output, maxOutput;
}PID;
void PID_Init(PID *pid, float p, float i, float d, float maxI, float maxOut)
{
pid->kp = p;
pid->ki = i;
pid->kd = d;
pid->maxIntegral = maxI;
pid->maxOutput = maxOut;
}
void PID_Calc(PID *pid, float reference, float feedback)
{
pid->lastError = pid->error;
pid->error = reference - feedback;
float dout = (pid->error - pid->lastError) * pid->kd;
float pout = pid->error * pid->kp;
pid->integral += pid->error * pid->ki;
if(pid->integral > pid->maxIntegral) pid->integral = pid->maxIntegral;
else if(pid->integral < -pid->maxIntegral) pid->integral = -pid->maxIntegral;
pid->output = pout+dout + pid->integral;
if(pid->output > pid->maxOutput) pid->output = pid->maxOutput;
else if(pid->output < -pid->maxOutput) pid->output = -pid->maxOutput;
}
PID mypid = {0};
int main()
{
PID_Init(&mypid, 10, 1, 5, 800, 1000);
while(1)
{
float feedbackValue = ...;
float targetValue = ...;
PID_Calc(&mypid, targetValue, feedbackValue);
设定执行器输出大小(mypid.output);
delay(10);
}
}
|
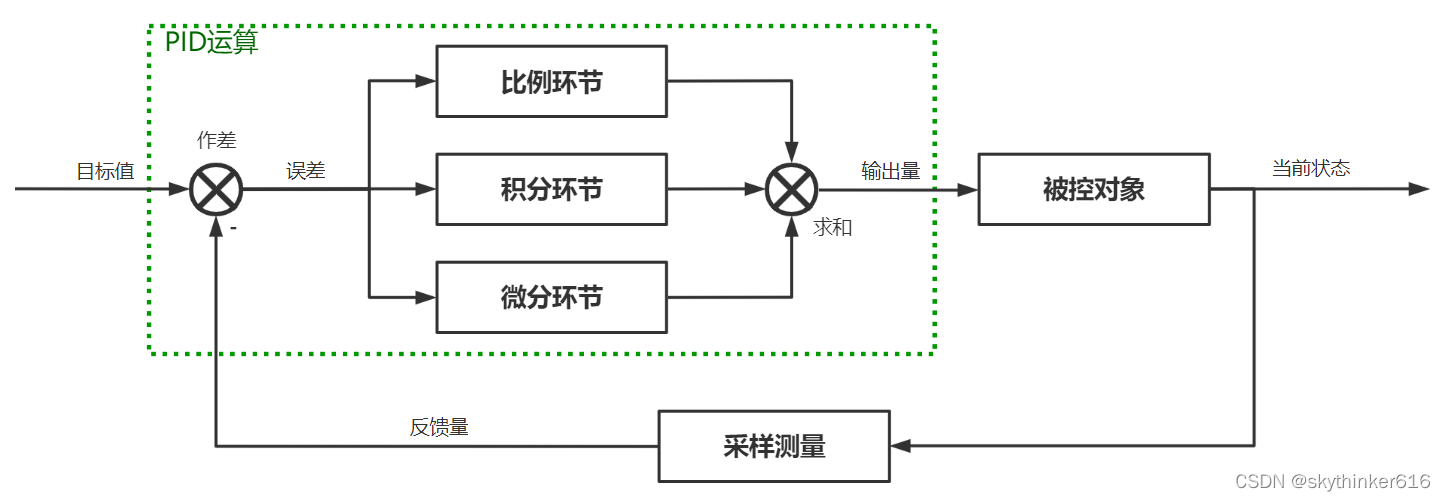
PID三个环节作用
- 比例:起主要控制作用,使反馈量向目标值靠拢,但可能导致振荡
- 积分:消除稳态误差,但会增加超调量
- 微分:产生阻尼效果,抑制振荡和超调,但会降低响应速度
例子
对电机转速进行控制
可用条件:已知电机的实时转速,并且可控制电机中流过的电流大小
PID目标值:需要电机达到的转速
PID反馈值:电机的实时转速
PID输出值:电机中流过的电流大小
分析:电机中流过的电流大小近似正比于电机的扭矩,也就近似正比于电机角加速度的大小,是转速的低阶物理量,因此可以用电流大小作为输出值
串级PID
单级PID目标值和反馈值经过一次PID计算就得到输出值并直接作为控制量,但如果目标物理量和输出物理量之间不止差了一阶的话,中间阶次的物理量我们是无法控制的。比如:目标物理量是位置,输出物理量是加速度,则小球的速度是无法控制的。
而串级PID就可以改善这一点。串级PID其实就是两个单级PID“串”在一起组成的,它的信号框图如下:
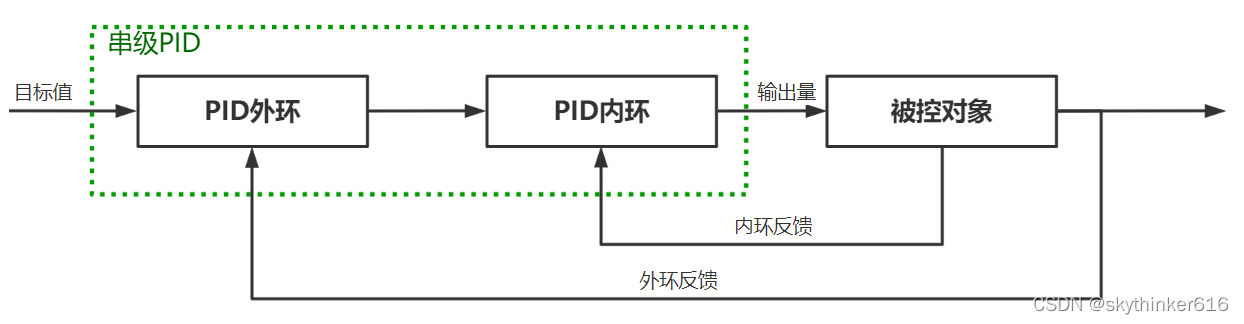
外环和内环就分别是一个单级PID,每个单级PID就如我们之前所说,需要获取一个目标值和一个反馈值,然后产生一个输出值。串级PID中两个环相“串”的方式就是将外环的输出作为内环的目标值。
案例
可用条件:小球实时位置、小球实时速度、施加在小球上的控制力
目标值:小球目标位置
外环反馈:小球实时位置
内环反馈:小球实时速度
输出值:施加在小球上的控制力
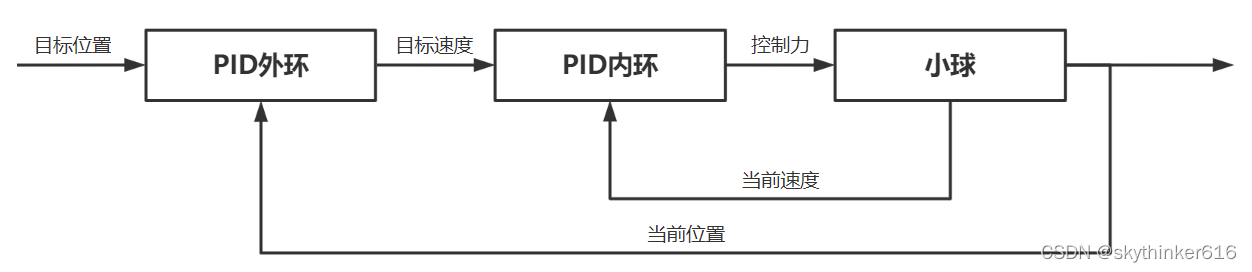
内环与小球构成了一个恒速系统,PID内环负责小球的速度控制;而如果把内环和小球看作一个整体被控对象,外环又与这个对象一起构成了一个位置控制系统,外环负责位置控制;总体来说,外环负责根据小球位置误差计算出小球需要达到的速度,而内环负责计算出控制力使小球达到这个目标速度,两个环协同工作,就可以完成任务了。
串级PID的内环一般负责低阶物理量(通常是变化更快、更基础的物理量)的调节,而外环负责高阶物理量(通常是变化较慢、更关注的最终目标量、高阶量的导数或相关量)的调节并计算出低阶物理量的目标值。
任务:对电机进行串级角度控制
可用条件:电机实时角度、电机实时转速、可以控制电机电流大小
外环目标值:需要电机达到的角度
外环反馈值:电机的实时角度
内环反馈值:电机的实时速度
输出值:电机电流大小
分析:外环负责电机角度控制,根据电机目标角度和反馈角度计算出目标转速;内环负责转速控制,根据速度反馈和目标转速计算出电流
代码实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
|
typedef struct
{
PID inner;
PID outer;
float output;
}CascadePID;
void PID_CascadeCalc(CascadePID *pid, float outerRef, float outerFdb, float innerFdb)
{
PID_Calc(&pid->outer, outerRef, outerFdb);
PID_Calc(&pid->inner, pid->outer.output, innerFdb);
pid->output = pid->inner.output;
}
CascadePID mypid = {0};
int main()
{
PID_Init(&mypid.inner, 10, 0, 0, 0, 1000);
PID_Init(&mypid.outer, 5, 0, 5, 0, 100);
while(1)
{
float outerTarget = ...;
float outerFeedback = ...;
float innerFeedback = ...;
PID_CascadeCalc(&mypid, outerTarget, outerFeedback, innerFeedback);
设定执行机构输出大小(mypid.output);
delay(10);
}
}
|
调参
需要先断开两环的连接,手动指定内环目标值,进行内环调参,当内环控制效果较好后再接上外环进行外环调参,具体的调参方法与单级PID相同。